生産現場の「最後のアナログ」を自動化する

電子機器の製造現場(SMTライン)において、マウンター(表面実装機)の進化には目覚ましいものがあります。
毎時数万チップを打ち込む高速性能や、極小部品を高精度に配置する技術は、すでに極限に近いレベルに達しています。
しかし、その一方で多くの工場が直面している課題があります。
それが「部品供給のボトルネック」です。
マウンターがどれだけ速くなっても、部品のリールが切れた際に人間が倉庫から運び、手作業でセットしている限り、ラインの停止時間はゼロにはなりません。
また、熟練工の不足や人的ミスによる部品のセット間違いは、品質低下や大規模な手直しに直結します。
本記事では、AMR(自律走行搬送ロボット)と協働ロボットを組み合わせた「完全無人供給」の仕組みについて解説します。
マウンターが自ら在庫を管理し、ロボットが部品を運んでくる。
そんな「止まらないライン」がどのように実現されるのか、その最前線を見ていきましょう。
1. 言葉の定義と背景:なぜ今「無人供給」が必要なのか
AMR(自律走行搬送ロボット)とは
AMRは「Autonomous Mobile Robot」の略称です。
従来のAGV(無人搬送車)が床面の磁気テープやレールに沿って走るのに対し、AMRは内蔵されたセンサーやカメラで周囲の地図を作成し、障害物を避けながら自律的に目的地まで走行します。
工場内のレイアウト変更にも柔軟に対応できるのが最大の特徴です。
協働ロボット(コボット)とは
産業用ロボットの中でも、人間と同じ空間で安全柵なしに働けるよう設計されたロボットです。
トルク検知などの安全機能を備えており、AMRの上部に搭載して「移動型作業ロボット」として活用されるケースが増えています。
無人供給が重要視される背景
現在、製造業界では多品種少量生産へのシフトが進んでいます。
これにより、部品の切り替え(段取り替え)の頻度が激増しました。
従来の「人がリールを持って走る」運用では、以下の問題が無視できなくなっています。
- 作業者の移動距離の増大による疲労と効率低下
- 部品供給の遅れによるラインストップ
- 誤った部品をセットするヒューマンエラーのリスク
- 深夜・休日シフトにおける人員確保の困難
これらの課題を解決し、24時間安定した生産体制を築くための切り札が、AMRと協働ロボットによる自動供給システムなのです。
2. 具体的な仕組み:デジタルとフィジカルの高度な連携

完全無人供給を実現するためには、ハードウェア(ロボット)だけでなく、工場全体を制御するソフトウェアとの連携が不可欠です。
その仕組みは大きく分けて3つのレイヤーで構成されます。
情報を司るレイヤー(MESとマウンターの通信)
まず、マウンター自体が「あと何枚基板を打てば部品がなくなるか」をリアルタイムで把握しています。
これをスマートフィーダー(個別の部品情報を管理する供給装置)と連動させ、上位システムのMES(製造実行システム)へ伝達します。
MESは生産計画と照らし合わせ、部品が切れる前に「出庫指示」を自動で発行します。
これが「マウンターが自ら部品を発注する」状態の正体です。
連携を司るレイヤー(フリートマネジメント)
MESからの指示を受けた「フリートマネジメントシステム(ロボット管制システム)」は、稼働可能なAMRに対して最適なルートを割り当てます。
倉庫の自動ストレージシステムから出庫された部品リールを、どのAMRが、どのタイミングでピックアップし、どのマウンターへ運ぶべきかを瞬時に判断します。
物理的な作業を行うレイヤー(AMRと協働ロボットの動作)
AMRはレーザーセンサー(LiDAR)を用いて自己位置を推定しながら走行します。
マウンターの前に到着すると、搭載された協働ロボットがカメラ(画像認識)を使用して、正確な供給位置を特定します。
その後、ロボットアームが空のリールを抜き取り、新しいリールをセットします。
この際、ロボットは部品のバーコードをスキャンし、MES上のデータと照合することで、物理的なセット間違いを100%防止します。
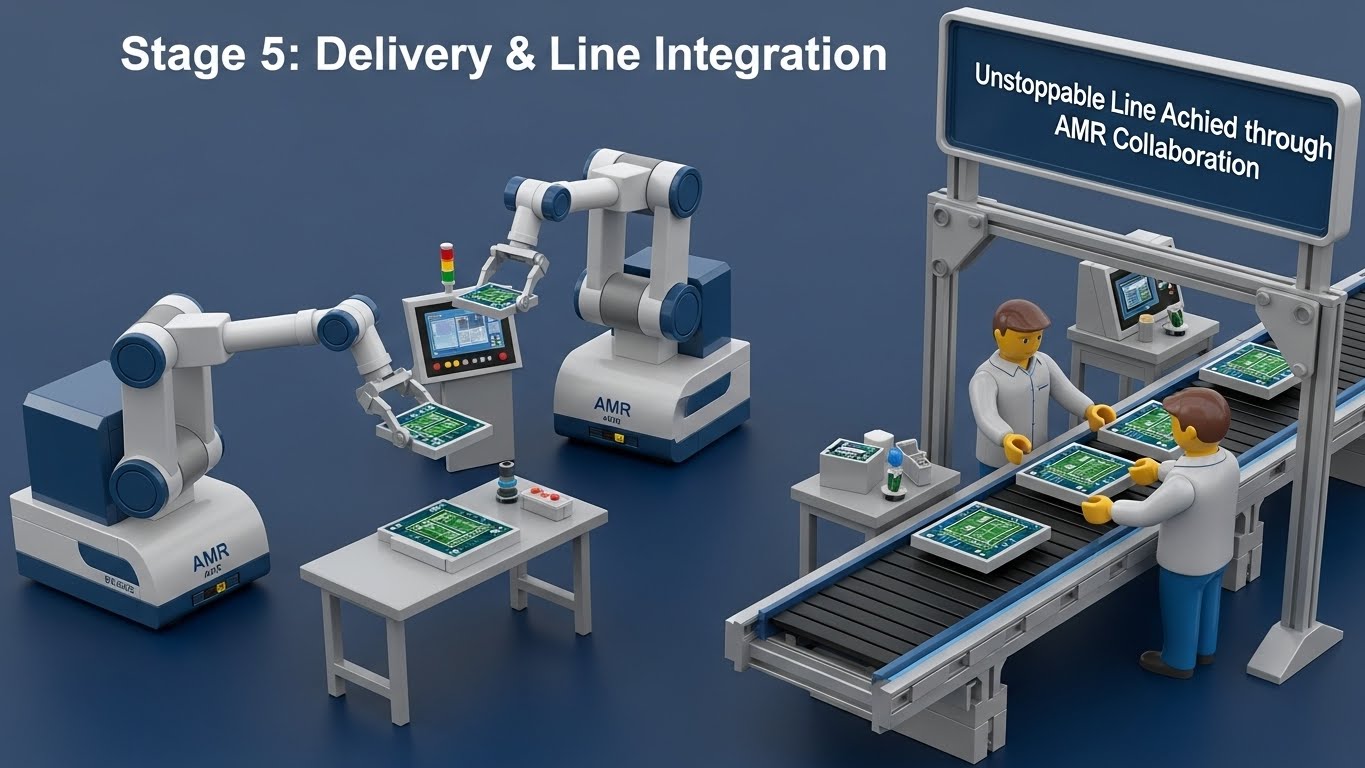
3. 作業の具体的な流れ:部品供給の自動化5ステップ
実際にどのようなプロセスで部品が運ばれるのか、5つのステップで解説します。
ステップ1:残数監視と先行予測
マウンターの制御PCが、現在装着されているリールの残数を常にカウントします。
設定された閾値(例:残り500点)を下回った時点で、システムがアラートを発信します。
重要なのは、無くなってから呼ぶのではなく、搬送にかかる時間を計算して「未来の欠品」を予測して動く点です。
ステップ2:自動倉庫からの出庫指示
指示を受けた自動倉庫(タワー型の部品保管庫など)が、該当するリールを搬送口へと送り出します。
このとき、リールの外径やテープ幅などの情報も同時にロボットへ共有されます。
ステップ3:AMRによる自律搬送
AMRが倉庫のピックアップポイントへ向かい、リールを受け取ります。
工場内ではフォークリフトや人間が行き交いますが、AMRはこれらを検知して一時停止や回避を行いながら、最短ルートで該当のSMTラインへと向かいます。
ステップ4:協働ロボットによる自動交換
マウンターに到着したAMRは、マウンターの通信インターフェース(SEMI規格など)を通じて「今から交換します」という信号を送ります。
協働ロボットが古いフィーダーやリールを回収し、新しいものを装着します。
この間、隣接する他のヘッドは動作を継続できるため、ラインを完全に止める必要がありません。
ステップ5:在庫情報の自動更新
交換完了後、システム上の在庫データが自動で更新されます。
使用済みの空リールはAMRによって廃棄場所や回収場所へと運ばれ、一連のサイクルが完了します。
4. 最新の技術トレンドと将来性
AMRと協働ロボットによる無人化は、現在さらに一歩進んだ段階に入っています。
AIによる搬送効率の最適化
AIが工場内の「渋滞」を予測し、複数のAMRのルートを動的に変更する技術が導入されています。
また、部品の使用頻度を学習し、よく使う部品をあらかじめライン近くの「仮置き場」に運んでおくといった、予測型物流も現実味を帯びています。
5G通信の活用
超低遅延・多接続が可能な5G(特にローカル5G)を活用することで、数百台のロボットと数千台のセンサーをリアルタイムで同期させることが可能になります。
これにより、ロボットの動作がより滑らかになり、システムの信頼性が向上します。
「ライトアウトファクトリー」の実現
最終的には、照明を消した暗闇の中でも24時間ロボットだけが動き続ける「ライトアウトファクトリー(消灯工場)」が目標です。
AMRによる部品供給だけでなく、基板の搬送、検査、梱包までが完全に無人化される未来は、すぐそこまで来ています。
5. よくある質問(FAQ)
Q1. 既存の古いマウンターでもAMR連携は可能ですか?
基本的には可能です。
マウンター自体に通信機能がなくても、外部センサーを取り付けて残数をカウントしたり、信号灯の情報を読み取ってシステムに送るゲートウェイ機器を導入することで、AMRと連携させる後付けソリューションが存在します。
Q2. 導入コストの回収(ROI)にはどのくらいかかりますか?
工場の規模や稼働率によりますが、一般的には2年から3年程度で投資回収ができるケースが多いです。
人件費の削減だけでなく、ラインストップの減少による生産数増加や、誤実装による廃棄ロスの削減といった「見えないコスト」の改善効果が非常に大きいためです。
Q3. 人間と同じ通路を走らせても安全ですか?
はい、安全です。AMRは国際的な安全規格(ISO 3691-4など)に準拠しており、障害物を検知すると瞬時に停止または回避します。
協働ロボットも、万が一接触した際には即座に動作を停止するセンサーを搭載しているため、人間と共存して作業を行うことができます。
Q4. 部品リールの種類(サイズ)が多くても対応できますか?
最近のロボットハンド(エンドエフェクタ)は汎用性が高く、直径の異なるリールやテープ幅の違いに対応可能です。また、複数のハンドを自動で持ち替えるツールチェンジャー機能を備えたモデルも登場しています。
まとめ:競争力を生む「止まらない」という価値
マウンターの高速化が進んだ現代において、工場の競争力を決めるのは「マシンのカタログスペック」ではなく「マシンの稼働率をいかに維持するか」という点にシフトしています。
AMRと協働ロボットによる完全無人供給は、単なる省人化の手段ではありません。
それは、ヒューマンエラーを排除し、24時間365日、一定の品質でモノを作り続けるための「製造プラットフォーム」の変革です。
まずは小規模なエリアからAMRを導入し、徐々にMESとの連携を深めていくスモールスタートも可能です。
デジタルとロボティクスが融合した「止まらないライン」の構築は、日本の製造業が次世代で勝ち残るための必須条件と言えるでしょう。